Magnetic Levitation
Magnetic levitation (maglev) or magnetic suspension is a way of suspending an item using just magnetic fields as a support. The magnetic force is utilised to counteract the gravitational force as well as any other forces.
The lifting forces ensure that the system does not spontaneously slide or flip into a configuration where the lift is neutralised.
Magnetic levitation can be used in Maglev trains, contactless melting, magnetic bearings, and product displays.
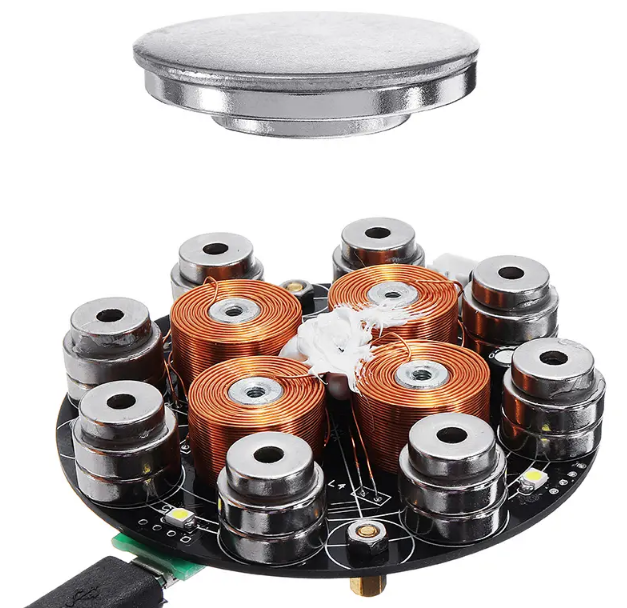
Components:
- 2 Hall sensor
- 4 Stabilising magnets
- 4 Controlled magnetic field generators
- Electronic control board
Working Principle:
Earnshaw’s theorem established decisively that levitating with only static, macroscopic paramagnetic fields never reaches stability. Any combination of gravitational, electrostatic, and magnetostatic fields acting on a paramagnetic item will make its position unstable along at least one axis, and it can be in unstable equilibrium along all axes. However, there are several options for making levitation feasible, such as using electronic stabilisation or diamagnetic materials (since relative magnetic permeability is less than one); it has been demonstrated that diamagnetic materials are stable along at least one axis and can be stable along all axes. Because conductors have a relative permeability to alternating magnetic fields of less than one, some configurations involving basic AC-driven electromagnets are self-stabilizing.
When the levitation system is able to dampen any vibration-like motion, it is said to be dynamically stable.
Motion can be dampened in a variety of ways:
- external mechanical damping (e.g. dashpots, air drag)
- eddy current damping (conductive metal influenced by field)
- mass dampers which have been fine-tuned in the levitated object
- electronically controlled electromagnets
In the current experiment stability is achieved by electronic control.
One of the Hall sensors is measuring the magnetic field along the x axis whereas the other one is measured on the y axis.
The circuit board reads the hall sensors and adjusts the current on the coils reacting to any change in the magnetic field and thus making the magnet on top to always move to the centre where the change in magnetic field is minimal.
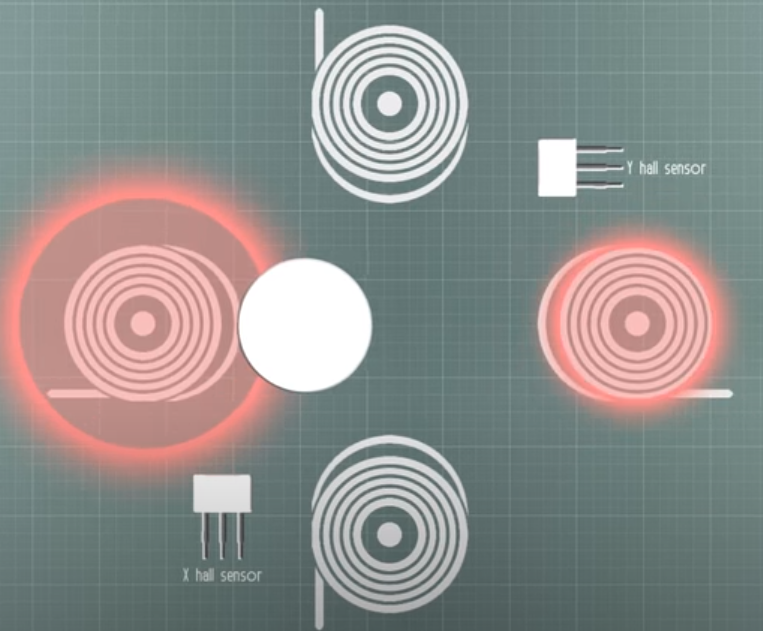
For example if the magnet moves to the left on the x axis the hall sensor detects a change in the magnetic field. This causes the electronic circuit to increase the current on the left coil and decrese the current on the right coil. As a consequence the high magnetic field will make the magnet shift back to the right side. The control is continuously correcting and acting on any change to achieve a stable levitation effect.
Instructions:
- Power on the circuit
- Place the magnet on top in between the 4 coils
- You can place a small item on top of the magnet and have it spinning if you manually start spinning it.
Links:
https://en.wikipedia.org/wiki/Magnetic_levitation